
International Space Station Surface Telerobotics Simulation
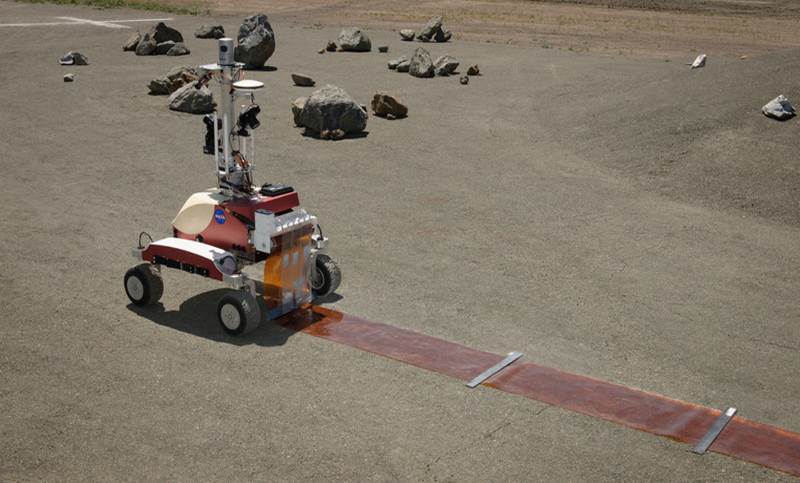
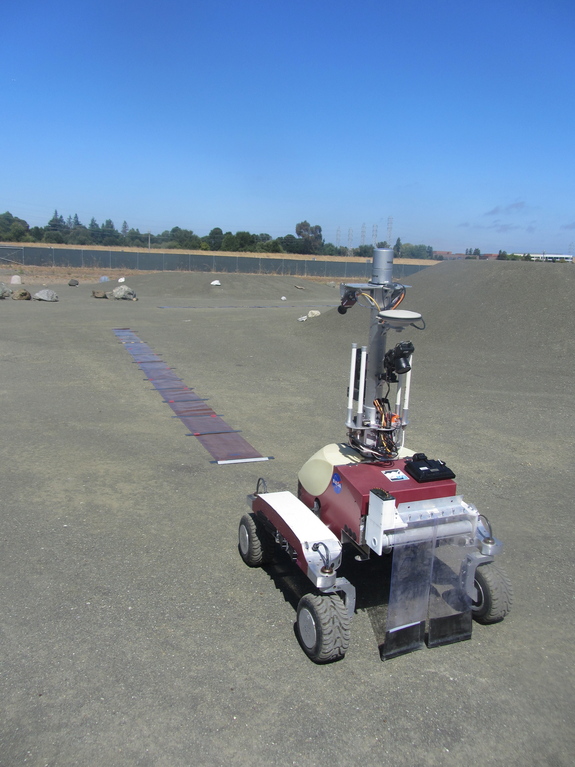
Above: The K10 rover deploys an arm of Kapton at NASA Ames' Roverscape in California.
In collaboration with the Intelligent Robotics Group at NASA Ames, LUNAR is conducting a telerobotics simulation during the summer of 2013. This test demonstrates a future exploration "concept of operations" in which an astronaut in an orbiting spacecraft remotely operates a robot on a planetary surface. The primary objective of the surface telerobotics test is to collect baseline engineering data (from crew, robot, and data communications) to characterize system operation. The ISS astronaut guides the K10 rover, located at NASA Ames' Roverscape in California, in deploying three arms of Kapton polyimide film as an analog to LUNAR's film-based lunar farside antenna array. This functions as the first phase of a series of tests to investigate deployment options and lunar farside L2 mission concept issues that may arise.
The simulation consists of three 3.5 hour crew sessions that will be conducted from June to August 2013: scouting, deployment, and inspection. The astronaut loads pre-planned traverse sequences to survey the deployment site to verify there are no obstructions in the antenna's path. The Kapton arms are deployed in a y-configuration and then the rover returns to inspect the antenna for tears or flaws.
This surface telerobotics test leads to a number of "firsts":
1. First real-time teleoperation of a planetary rover from the ISS
2. First real-time supervisory control of a planetary rover from the ISS
3. First astronaut to interactively control a high-fidelity planetary rover in an outdoor analog testbed
4. First use of ISS OpsLAN, OCA LAN and the NISN to connect an ISS crew computer to an outdoor robot
5. First use of the NASA "RAPID" robot messaging system to control a robot from space
6. First high-fidelity simulation of a human robot "Waypoint" mission concept (Earth-Moon L2 Lunar Farside telescope deployment concept proposed by LUNAR)
7. First engineering data collection (comm message data/link usage, user interface operation, robot telemetry, human-robot interaction of a crew-controlled surface telerobotic system
Results
Preliminary data analysis suggest that the robotics technologies tested in NASA's analog ground simulations (Haughton-Mars Project and Desert RATS) with a planetary rover remain highly effective when used on-orbit. In addition it appears that:
1. rover autonomy, particularly hazard detection and safeguagrding, greatly enhanced crew efficiency and robot utilization
2. interactive 3-D visualization of robot state and activity helped reduce operator workload and increase situation awareness (SA)
3. command sequencing with interactive monitoring is a highly effective strategy for crew-centric surface telerobotics.
This telerobotics simulation is the first step in investigating the human-robotic interaction in a space science exploration mission.
Updates
The first crew session was conducted successfully on 6/17/2013 with Expedition 35 flight engineer Chris Cassidy. After completing "just-in-time" training to learn the rover software interface, Cassidy completed the scouting sequence as well as deployed two of the three arms of the film.

Above: Expedition 35 ISS flight engineer Chris Cassidy undergoes a short training session to learn the rover software interface.
The second ISS crew session was successfully completed on 7/26/2013 by astronaut Luca Parmitano taking over where Chris Cassidy left off. He deployed the final arm of the telescope and then conducted an inspection traverse.
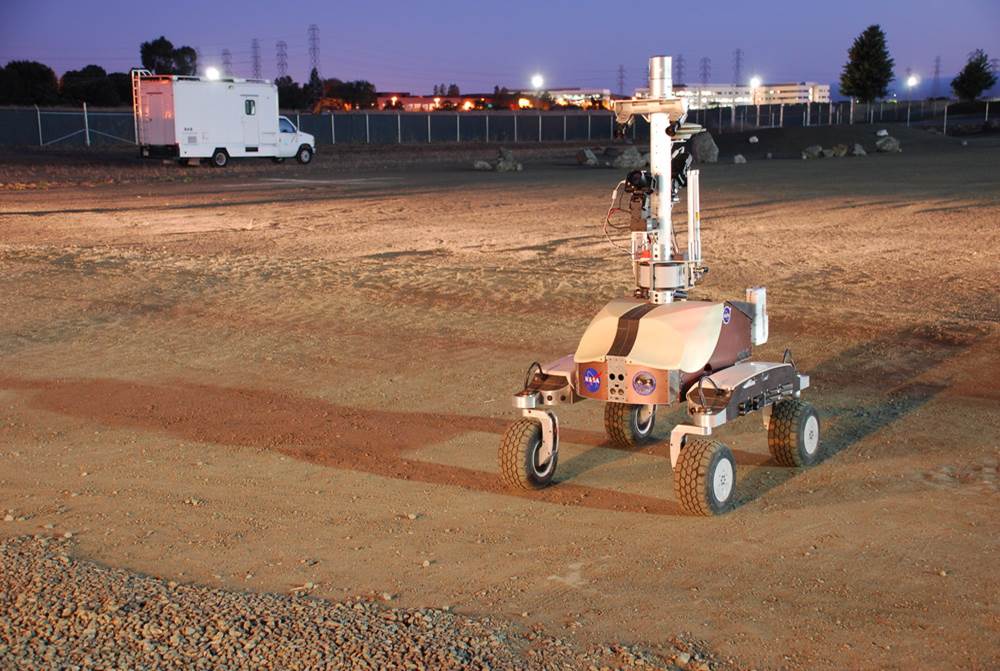
Above: The K10 rover turns back to complete an inspection of the telescope arm it just deployed. Astronaut Parmitano remotely controls the rover, looking for any obvious signs that the arm was not correctly deployed.
The third and final crew session took place on 8/20/13. Astronaut Karen Nyberg successfully completed deployment and inspection of the antenna.
Pictures
Rover Operations

Above: The K10 rover developed by NASA Ames' Intelligent Robotics Group is prepared for action the morning of the first crew session.
Below: Johnson Space Center Mission Control monitors the K10 rover's progress.

CU Boulder's Student Science Team

Above: A student team at the University of Colorado Boulder was responsible for identifying telescope deployment sites. Lead by astrophysics graduate student Laura Kruger, Undergraduate mechanical engineering student Miles Crist (back right) and undergraduate geology student Mike Leitshuh designed the rover traverse sequences and waypoints.
More Information
Click here to learn more about the surface telerobotics simulation, rover specifications, and software interface used by the astronauts.



